Hidden
Hidden
Hidden
Hidden
Hidden
Hidden
Hidden
Hidden
TROUBLESHOOTING LOW LEVEL VOLTGAGE
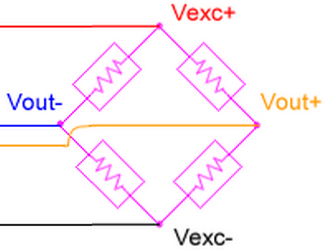
The instruNet digitizer is designed to attach directly to many different sensors including voltage, current, resistance, load cell, strain gage, thermocouple, and RTD. Our load cell sensor measures 0 to 2Kg of force and internally contains four 350 ohm resistors that are bonded to a metal plate that flexes when pressed, and in turn changes the resistor values. You can think of this as a sensor with a 350 ohm source impedance that receives a 3.3Vdc excitation voltage and produces a ±10mV signal with a 1.65Vdc offset. The data acquisition differential amplifier sees ±10mV and we will evaluate microvolt level errors. All pictures in this article are actual measurements from this setup. Below is a schematic of our sensor. Electrically, a load cell sensor is the same as a strain gage and mV/V pressure sensor. We focus on the following sources of error:
SETUP We also attach a dummy sensor to a 2nd measurement channel that is electrically similar to the load cell. It consists of four independent thin film resistors floating in air at the end of a cable, where the function generator is attached in the same way as the load cell. RFI couples more with increased source impedance; therefore, our dummy sensor has the same 350 ohm source impedance as the load cell. The 2nd channel is used to identify slight instability from within the load cell itself. A 3rd channel is grounded with a 2cm wire between data acquisition IN+ and IN-, and between GND and IN+. This 3rd channel is used to determine the internal system noise and thermal drift of the data acquisition system itself. All experiments are conducted with an instruNet i423 card on its ±10mV measurement range using instruNet World Oscilloscope/Strip chart software. This card provides software selectable 6Hz and 4000Hz 2pole analog low pass filters, software selectable digital filters, and software selectable integration (averaging). Many load cell manufacturers recommend an excitation voltage of 10V which pumps 285mW into the load cell (10^2/350 = 0.285). This creates heat and temperature drift; therefore we prefer to run at a lower 3.3V, which corresponds to a gentler 31mW. RFI COUPLES INTO SENSOR SIGNAL
On/Off Switching RFI
Sinewave RFI
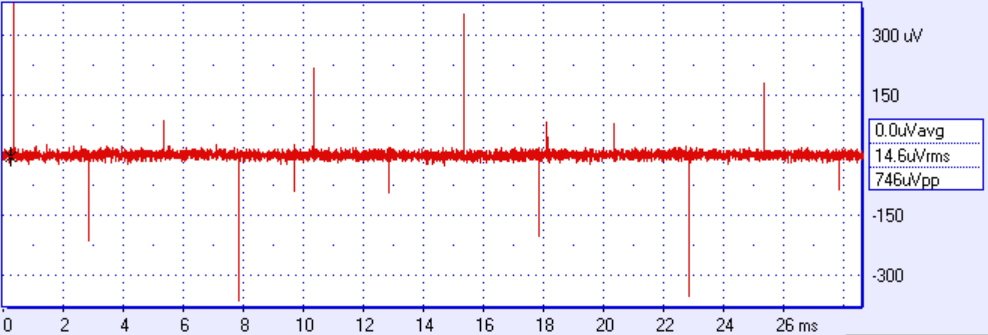
How to Detect RFI
How to Determine The Offending Source
Through Air or Metal?
Are Ground Loops Making you Crazy?
Will Differential Amplifier Common Mode Rejection Save Me?
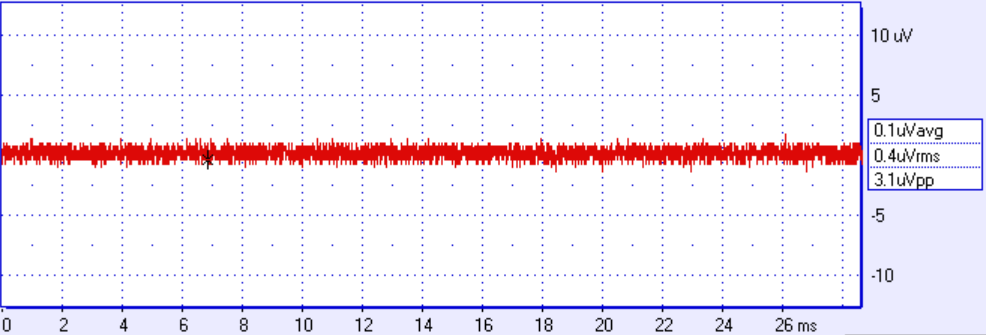
Will an Analog Low Pass Filter Save Me?
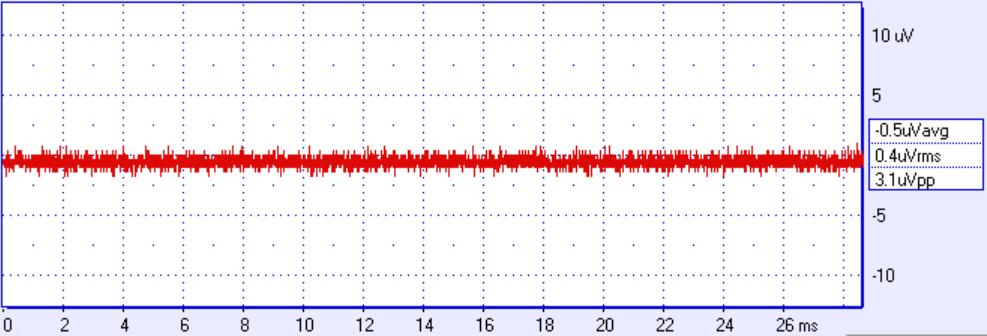
The below picture shows the effect of a 6Hz-2pole analog filter, which completely eliminates the spikes. The resulting waveform is 0.4μVrms of noise, which is the internal system noise of the data acquisition system itself when limited to 6Hz of bandwidth.
Will Software Integration Help? The below picture shows the effect of integrating for 1mSec (160 A/D values averaged to make each point). Some of the 1msec integration bins include a spike from our 200 Hz square wave, and some dont; therefore we still see some variation, yet at a reduced level.
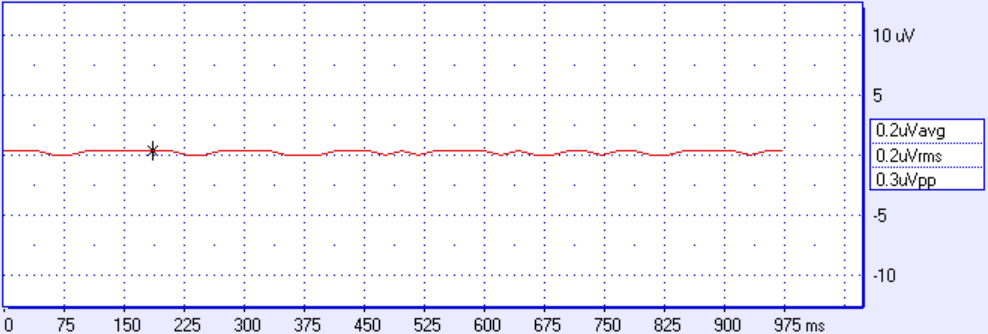
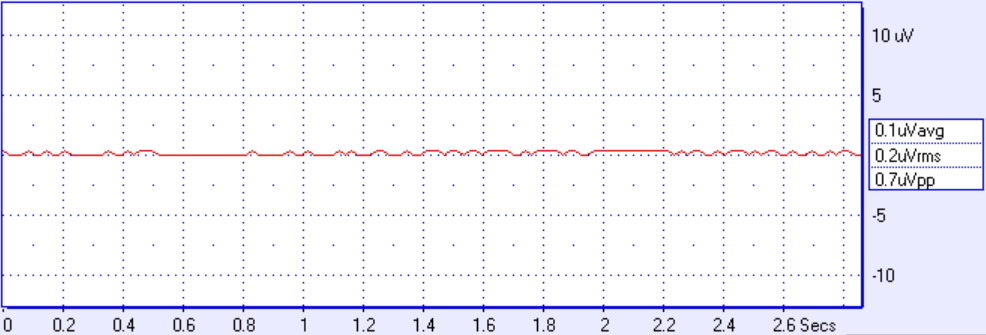
Note that upward spikes cancel downward spikes when integrating, provided there is an equal number in each integration bin (i.e. N upward cancels N downward). The upward and downward do alternate since they relate to on/off switching. However, if you get N+1 upward and N downward in one integration bit, then you will get an offset from that last spike not having a partner to cancel with. If one spike is small relative to your other A/D points, the effect is negligible (e.g. if you average 2600 points and one of them is off by 100-fold, the effect of that one point is 100/2600 = 1/26th); however, if you have fewer good points or your bad point is large, then your integration is less effective. The below picture shows the effect of integrating for 16.666mSec (2600 A/D values per point). This reduces our system noise to 0.2μVrms. Integrating for one power-line cycle (i.e. 1/60th of second = 0.016666 seconds) significantly reduces power-line noise due to the positive part of the power-line sinewave being canceled out by the negative part.
Software integration often reduces the maximum sample rate because the A/D needs to focus on reading one channel multiple times to get one point. In the above illustration for example, we integrate for 16mSec yet we also reduce the maximum sample rate from 166Ks/sec aggregate (all channels) to 60s/sec.
What to do if the sensor frequency is similar to the noise frequency? 50/60Hz Power Couples into Sensor Signal
How to Detect 50/60Hz Power Coupling
Fixing The Power Problem
Alternatively, we turn off analog filters and instead integrate for 16.666mSec to reduce system noise to 0.2μVrms, as shown below.
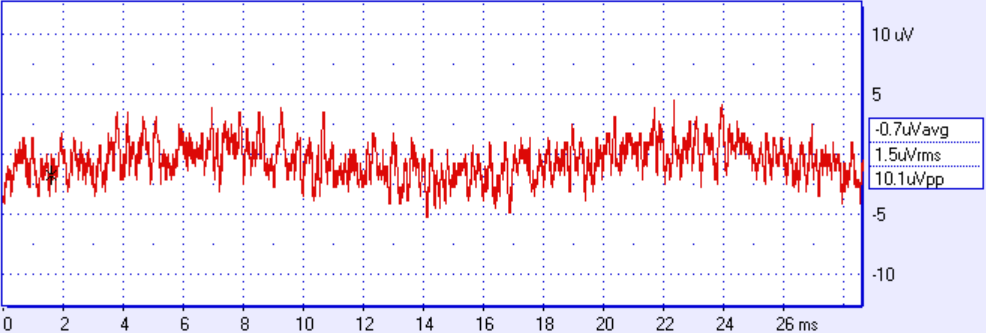
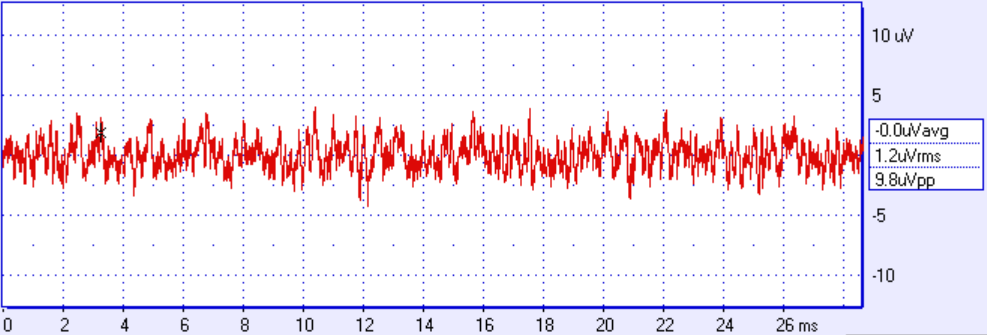
If your sensor signals are fast (i.e. > 60Hz) and you dont want to filter out your signal of interest, then consider a digital band stop filter, shown below. We still see 1.2μVrms of data acquisition system internal system noise, yet the 60Hz sine is gone.
Data Acquisition Internal System Noise
What To Do?
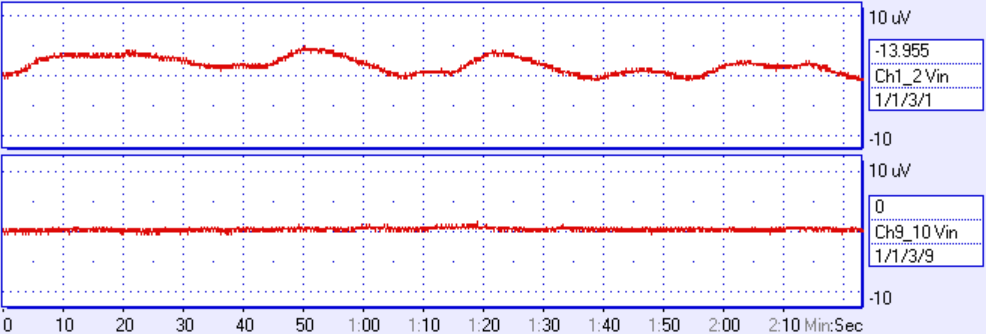
Thermal Drift and Sensor Instability Data acquisition systems drift slightly when their internal temperature changes. To see this, ground an input, digitize over 10 minutes, average each point for one power-line cycle to reduce noise (so we can focus on long term drift and not noise), gently heat the measurement system with a heat gun and view the digitized waveform with a small vertical scale (e.g. 2μV/div). After it warms, one can often command the system to recalibrate, and see the measurement move back to what one would expect. Sensor thermal drift is similar. One can gently heat the sensor with a heat gun and watch it change. Sensor instability is when a sensor changes yet not due to temperature and not due to a change in stimulus. The cause depends on the sensor itself. For example, a load cell might slightly relax mechanically over time after being stressed, and still stay within specification.
How To Measure Sensor Thermal Drift and Instability
To better characterize long term changes, one can simultaneously digitize a sensor and dummy resistor with one power-line cycle integration for several minutes to several hours with:
Conclusion
|
 Many articles evaluate different sources of error when measuring low voltage levels (e.g. ±10mV), yet seldom explain how to identify the cause of error, and if found, what to do about it. We will do this and show examples using a load cell sensor (pictured to the right) and an instruNet i423 digitizer.
Many articles evaluate different sources of error when measuring low voltage levels (e.g. ±10mV), yet seldom explain how to identify the cause of error, and if found, what to do about it. We will do this and show examples using a load cell sensor (pictured to the right) and an instruNet i423 digitizer.